University of Notre Dame
Aerospace and Mechanical Engineering
AME 301: Differential Equations, Vibrations and Control
Homework 7
B. Goodwine J. Lucey
Fall, 2003
Issued: October 20, 2003
Due: October 28, 2003 (US) 23 October 2003 (UK)
Introduction
The purpose of this homework is twofold. First,
it is designed for you to develop intuition regarding the effects of
changes of controller gains for PID control. Second, it will serve as
a brief introduction to numerical techniques for solving differential
equations, which is a subject we will study in detail near the end of
the semester. The term numerical simulation simply means using a
computer to solve the differential equation rather than using an
analytical method. You were introduced to this in EG 111 or 112 and are
probably familiar with the Euler method. Regardless, sample code is
provided on the course web page to help you write your program.
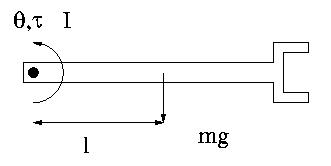
Consider the robot arm illustrated in the following figure, with
a mass m and moment of inertia I.
1.
Derive the equation of motion for the arm and linearize the
equation about (we did this in class).
2.
Via numerical simulation of the linearized equations, (pick your own values for I, m,
l and , and use any programming language and/or environment you want)
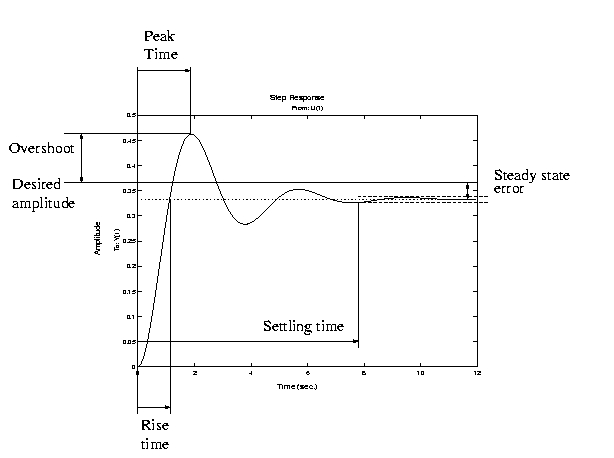
verify the following ``rules of
thumb'' for PID control in light of the definitions of rise time,
peak time, overshoot, settling time and steady state error from the following figure.
Submit plots indicating the response of the system as well as the
gain values used.
(a)
For proportional control, i.e., kp > 0, kd = 0 and
kI=0, the solutions are oscillatory, and increasing kp increases the frequency of oscillation (which decreases the rise
time and peak time) but decreases the mean steady state error. The settling time is infinite.
(b)
If derivative control is added to the proportional controller,
i.e., kp > 0, kd > 0 and kI=0, then
i.
for small kd the solutions are decaying oscillations;
ii.
increasing kd decreases the settling time;
iii.
increasing kd sufficiently eliminates the oscillatory
behavior completely, resulting in an solution which exponentially
decays to the final, steady state value;
iv.
increasing kp decreases the final steady state error;
v.
increasing kp decreases the rise time.
(c)
Adding integral control (PID control)
i.
eliminates the steady state error, even for small values of kp,
ii.
increasing kI generally increases the overshoot and settling time;
iii.
increasing kp decreases rise time, but may increase
overshoot;