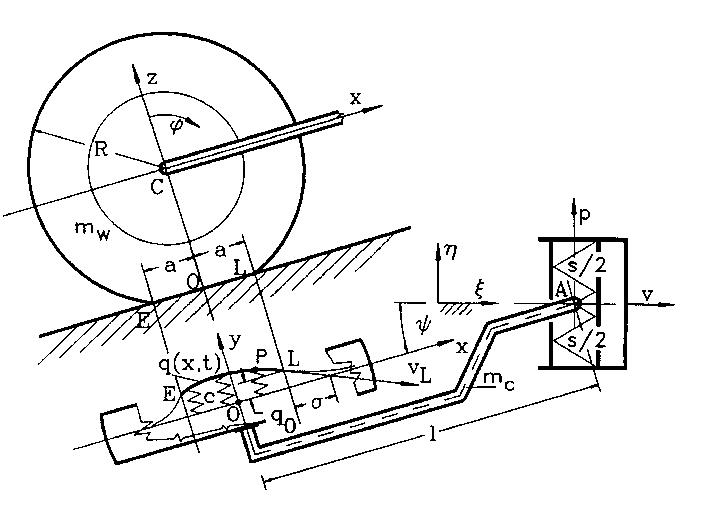
If we assume that the tire is rigid, i.e., q(x,t) = 0 and that it rolls without slipping, the equations of motion are
- Follow the procedure outlined in class to find an output function which makes this system feedback linearizable. Since the wheel rotation angle is cyclic, we can ignore the third equation, and full state linearization requires a relative degree of three.
- Simulate the system (both controlled and uncontrolled) using the following parameter values: mc = 1.5kg, mw = 2.75kg, l = 0.152 m, r = 0.1m, k = 75N/m and v = 1m/s.
near
-
-
-
-
-
 for various
for various  .
.