Homework 7, due Wednesday March 23.
Posted: Wed Mar 16, 2005 4:42 pm
(20 points each) Determine the equations of motion for each of the systems illustrated in the following figures. For each system, clearly label your coordinates on the figure. If a parameter is missing that is necessary for the problem, feel free to add an appropriate label, but clearly indicate that you did so on the figure.
- The following system is comprised of two masses and two springs. The first mass is constrained to move horizontally and the second mass is constrained to maintain contact with the angled surface of the first mass. It may be advisable, although not necessary, to use the horizontal deflection of the first mass from the unstretched position of spring one as the first coordinate and the deflection of mass 2 along the surface of mass one from the unstretched position of spring 2 as the second coordinate for this problem.
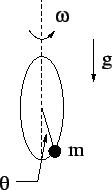
- The following system is comprised of a circular wire hoop that rotates about its vertical axis with a constant angular velocity of $\omega$. A particle or bead is constrained to slide along the hoop, and $\theta$ is the angle of the bead from the ``straight down'' position. Hint: you only need to consider the motion of the particle - since the hoop moves with a constant angular velocity, it does not really have any ``dynamics.''
- The following system is a double pendulum. The only difference between this one and the example in class is that there is a torque about each hinge. The first hinge has a torque of $\tau = \sin t$ and the second hinge has a torque of $\tau = \sin 2 t$. Assume that each link is massless.
- This system is a turntable with moment of inertia $I$. Its angular position is represented by the coordinate $\theta$. On the surface of the turntable there is a groove or slot oriented radially along which a mass of mass $m$ is constrained to move. The mass is attached to a spring with spring constat $k$. The coordinate $x$ represents the radial position of the mass and is measured from the unstretched position of the spring.
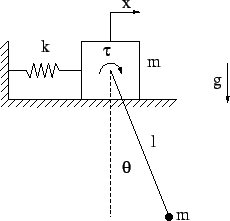
- This system is a mass-pendulum system like the example considered in class on March 5. The only difference is that there is a torque, $\tau = \cos t$ applied at the hinge of the pendulum. Assume the link is massless.