Homework 9, due April 25.
Posted: Wed Apr 18, 2007 10:20 am
Update Friday, April 20, 14:45. Two extra credit problems added.
- If
- In class we determined regions in the complex plane where the poles of a second order system will meet overshoot and settling time requirements. The rise time specification is a bit harder to nail down. Rather than delve into it analytically, this problem will let you verify that one approximation via a few numerical experiments.
A common approximation is to use- Pick three different sets of complex conjugate pairs of poles (with different damping ratios and different natural frequencies) and use the matlab step() function to verify that this is at least an o.k approximation. Also verify that the settling time and overshoot are what would be expected based upon the second order pole locations.
- Plot the region in the complex plane where a pair of second order complex conjugate poles should be located so that the rise time is less than 2 seconds.
- Consider
- Sketch the root locus for this transfer function.
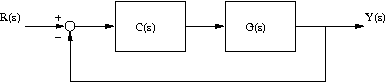
- In the following block diagram if C(s)=k, based upon your root locus plot, describe what will happen as k gets large to the percentage overshoot of the response, y(t), if the input, r(t) is a step input.
- Using your root locus plot, determine a k value so that the percentage overshoot is approximately 20%. Verify it using the matlab step() command.
- Consider
- Sketch the root locus plot for this transfer function.
- Based upon your root locus plot, describe what will happen to the step response of this transfer function if it is placed in the same block diagram as above as k gets large. Specifically describe what will happen to the percentage overshoot, the settling time and the rise time.
- Sketch the root locus plot for
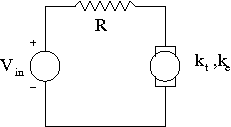
- Consider a dc motor driven by a circuit as illustrated in the following figure. Assume that the shaft of the motor has a moment of inertia J.
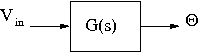
- If the following block diagram represents this system, determine G(s).
- Referring to the block diagram in the second problem above (with a C(s) and G(s)), determine the transfer function from the desired angular position to the actual angular position for the cases of
- proportional control;
- proportional plus derivative control;
- proportional plus derivative plus integral control; and
- proportional plus integral control.
- Without substituting anything for C(s) or G(s) determine the transfer function from the desired angle to the actual angle.
- For each of the control methods in part c, if you were to sketch the root locus plot to determine how the poles of the transfer function varied as k went from 0 to +infinity, what would be the transfer function that you would use? In other words, the rules to plot the root locus are described in terms of a particular transfer function that is not the "overall" transfer function (e.g., on the real axis, the root locus is to the left of an odd number of poles plus zeros of the transfer function).
- Sketch the root locus for
- Finally, for the transfer function in the previous problem, determine G(s) where s=1+i by
- substituting s into G and evaluating it; and,
- measuring the angle and distance from each of the poles and zeros of G(s) and computing the magnitude and angle of G(s) based upon those measurements.
- (Extra credit) Sketch the root locus plot for
- (Extra credit) Sketch the root locus plot for