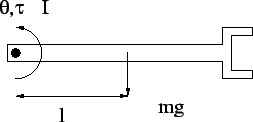
- Consider the robot arm illustrated in the following figure (the same as we did in class).
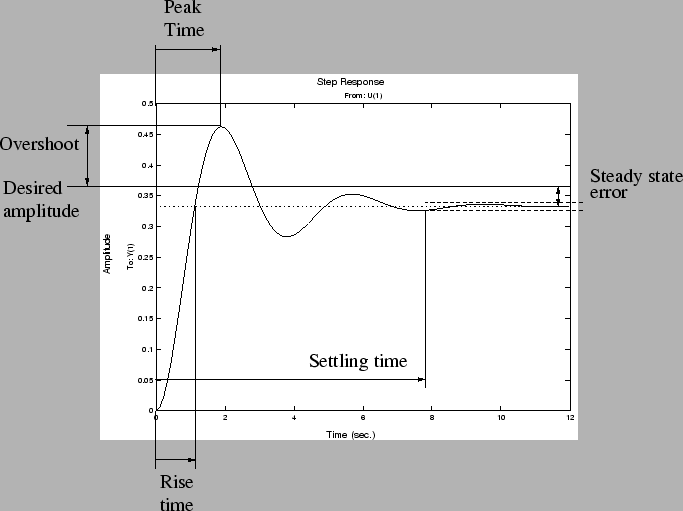
- Using this program, verify the following "rules of thumb" for PID control using the definitions of ise time, peak time, overshoot, settling time and steady state error from the following figure.
- For proportional control, i.e., kp > 0, kd = 0 and kI=0, the solutions are oscillatory, and increasing kp increases the frequency of oscillation (which decreases the rise time and peak time) but decreases the mean steady state error. The settling time is infinite. Hint pick a starting value of kp=5.
- If derivative control is added to the proportional controller, i.e., kp > 0, kd > 0 and kI=0, then
- for small kd the solutions are decaying oscillations;
- increasing kd decreases the settling time;
- increasing kd sufficiently eliminates the oscillatory behavior completely, resulting in an solution which exponentially decays to the final, steady state value;
- increasing kp decreases the final steady state error;
- increasing kp decreases the rise time.
- Adding integral control (PID control)
- eliminates the steady state error, even for small values of kp,
- increasing kI generally increases the overshoot and settling time;
- increasing kp decreases rise time, but may increase overshoot;
- increasing kd increases damping and stability.
Homework 6
Due: currently flexible.
-
goodwine
- Site Admin
- Posts: 1596
- Joined: Tue Aug 24, 2004 4:54 pm
- Location: 376 Fitzpatrick
- Contact:
Homework 6
Return to “AME 34314 Homework 6”
Jump to
- AME 50650, Fall 2018
- ↳ Course Administration
- AME 50652, Spring 2018
- ↳ Course Administration
- ↳ AME 50652, Homework 1
- ↳ AME 50652, Homework 2
- ↳ AME 50652, Homework 3
- ↳ AME 50652, Homework 4
- ↳ AME 50652, Homework 5
- ↳ AME 50652, Homework 6
- ↳ AME 50652, Homework 7
- ↳ AME 50652, Homework 8
- ↳ AME 50652, Homework 9
- ↳ AME 50652, Homework 10
- ↳ AME 50652, Last Homework
- AME 30314, Fall 2017
- ↳ Course Administration
- ↳ AME 30314, Homework 1
- ↳ AME 30314, Homework 2
- ↳ AME 30314, Homework 3
- ↳ AME 30314, Homework 4
- ↳ AME 30314, Homework 5
- ↳ AME 30314, Homework 6
- ↳ Design Project
- ↳ AME 30314, Homework 7
- ↳ AME 30314, Homework 8
- ↳ AME 30314, Homework 9
- ↳ AME 30314, Homework 10
- EG 34440, Summer 2017
- ↳ Course Administration
- AME 30315, Spring 2017
- ↳ Course Administration
- ↳ AME 30315, Homework 0
- ↳ AME 30315, Homework 1
- ↳ AME 30315, Homework 2
- ↳ AME 30315, Homework 3
- ↳ AME 30315, Homework 4
- ↳ AME 30315, Homework 5
- ↳ AME 30315, Homework 6
- ↳ AME 30315, Homework 7
- ↳ AME 30315, Homework 8
- ↳ AME 30315, Homework 9
- ↳ AME 30315, Homework 10
- AME 30314, Fall 2016
- ↳ Course Administration
- ↳ AME 30314, Homework 1
- ↳ AME 30314, Homework 2
- ↳ AME 30314, Homework 3
- ↳ AME 30314, Homework 4
- ↳ Exam 1 Virtual Office Hours
- ↳ AME 30314, Homework 5
- ↳ AME 30314, Homework 6
- ↳ Design Project
- ↳ Exam 2, Take 2
- ↳ AME 30314, Homework 7
- ↳ AME 30314, Homework 8
- ↳ Project
- ↳ AME 30314, Last Homework
- AME 30314, Fall 2015
- ↳ Course Administration
- ↳ AME 30314, Homework 0
- ↳ AME 30314, Homework 1
- ↳ AME 30314, Homework 2
- ↳ AME 30314, Homework 3
- ↳ AME 30314, Homework 4
- ↳ AME 30314, Homework 5
- ↳ AME 30314, Homework 6
- ↳ AME 30314, Homework 7
- ↳ AME 30314, Exam 2, part deux
- ↳ AME 30314, Homework 8
- ↳ AME 30314, Homework 9
- ↳ AME 30314, Homework 10
- ↳ AME 30314, Last Homework!
- ↳ Exam 2 Solutions and Final Exam Questions
- AME 90951, Spring 2015
- ↳ Course Administration
- AME 30314, Fall 2014
- ↳ Course Administration
- ↳ AME 30314, Homework 0
- ↳ AME 30314, Homework 1
- ↳ AME 30314, Homework 2
- ↳ AME 30314, Homework 3
- ↳ AME 30314, Homework 4
- ↳ AME 30314, Homework 5
- ↳ AME 30314, Homework 6
- ↳ AME 30314, Homework 7
- ↳ AME 30314, Homework 8
- ↳ AME 30314, Homework 9
- ↳ AME 30314, Last Homework
- AME 50650, Spring 2014
- ↳ Course Administration
- ↳ Homeworks
- AME 50652, Spring 2014
- ↳ Course Administration
- ↳ AME 50652, Homework 1
- ↳ AME 50652, Homework 2
- ↳ AME 50652, Homework 3
- ↳ AME 50652, Homework 4
- ↳ AME 50652, Homework 5
- ↳ AME 50652, Homework 6
- ↳ AME 50652, Homework 7
- ↳ AME 50652, Homework 8
- AME 30314, Fall 2013
- ↳ Course Administration
- ↳ AME 30314, Homework 0
- ↳ AME 30314, Homework 1
- ↳ AME 30314, Homework 2
- ↳ AME 30314, Homework 3
- ↳ AME 30314, Homework 4
- ↳ AME 30314, Homework 5
- ↳ AME 30314, Homework 6
- ↳ AME 30314, Homework 7
- ↳ AME 30314, Homework 8
- ↳ AME 30314, Homework 9
- ↳ AME 30314, Last Homework
- AME 90951, Spring 2013
- ↳ Course Administration
- ↳ AME 90951 Homeworks
- AME 30314, Fall 2012
- ↳ This Course is on Sakai
- ↳ Homework 0, due Friday August 30, 2013
- AME 30315, Spring 2012
- ↳ Course Administration
- ↳ AME 30315, Homework 0
- ↳ AME 30315, Homework 1
- ↳ AME 30315, Homework 2
- ↳ AME 30315, Homework 3
- ↳ AME 30315, Homework 4
- ↳ AME 30315, Homework 5
- ↳ AME 30315, Homework 6
- ↳ Pendulum Project
- ↳ AME 30315, Homework 7
- ↳ AME 30315, Homework 8
- ↳ AME 30315, Homework 9
- ↳ AME 30315, Homework 10
- ↳ AME 30315, Homework 11
- AME 30314, Fall 2011
- ↳ Course Administration
- ↳ AME 30314, Homework 0
- ↳ AME 30314, Homework 1
- ↳ AME 30314, Homework 2
- ↳ AME 30314, Homework 3
- ↳ AME 30314, Homework 4
- ↳ AME 30314, Homework 5
- ↳ AME 30314: Homework 6
- ↳ AME 30314: Homework 7
- ↳ AME 30314, Homework 8
- ↳ AME 30314, Homework 9
- ↳ AME 30314: Homework X
- ↳ AME 30314, Homework 11
- ↳ AME 30314, Last Homework
- AME 30315, Spring 2011
- ↳ Course Administration
- ↳ AME 30315, Homework 0
- ↳ AME 30315, Homework 1
- ↳ AME 30315, Homework 2
- ↳ AME 30315, Homework 3
- ↳ AME 30315, Homework 4
- ↳ AME 30315, Homework 5
- ↳ AME 30315, Homework 6
- ↳ AME 30315, Homework 7
- ↳ AME 30315, Homework 8
- ↳ AME 30315, Homework 9
- ↳ AME 30315, Homework 10
- ↳ AME 30315, Homework 11
- ↳ AME 30315, Pendulum Control Project
- ↳ AME 30315, Homework 12
- ↳ AME 30315, Homework 13
- AME 30314, Fall 2010
- ↳ Course Administration
- ↳ AME 30314, Homework 0
- ↳ AME 30314, Homework 1
- ↳ AME 30314, Homework 2
- ↳ AME 30314, Homework 3
- ↳ AME 30314, Homework 4
- ↳ AME 30314, Homework 5
- ↳ AME 30314, Homework 6
- ↳ AME 30314, Homework 7
- ↳ AME 30314, Homework 8
- ↳ AMe 30314, Homework 9
- ↳ AME 30314, Homework 10
- ↳ AME 30314, Homework 11
- ↳ Virtual Office Hours
- AME 30315, Spring 2010
- ↳ Course Administration
- ↳ AME 30315, Homework 1
- ↳ AME 30315, Homework 2
- ↳ AME 30315, Homework 3
- ↳ AME 30315, Homework 4
- ↳ AME 30315, Homework 5
- ↳ AME 30315, Homework 6
- ↳ AME 30315, Homework 7
- ↳ AME 30315, Homework 8
- ↳ AME 30315, Homework 9
- ↳ AME 30315, Homework 10
- ↳ AME 30315, Last Homework
- ↳ AME 30315, Virtual Office Hours
- AME 20214, Fall 2010
- ↳ Course Administration
- ↳ AME 20214, Homework 0
- ↳ AME 20214, Homework 1
- ↳ AME 20214, Homework 2
- ↳ AME 20214, Homework 3
- ↳ AME 20214, Homework 4
- ↳ AME 20214, Homework 5
- ↳ AME 20214, Homework 6
- ↳ AME 20214, Homework 7
- ↳ AME 20214, Homework 8
- ↳ AME 20214, Final Project
- AME 60652, Spring 2010
- ↳ Course Administration
- ↳ AME 60652, Homework 1
- ↳ AME 60652, Homework 2
- ↳ AME 60652, Homework 3
- ↳ AME 60652, Homework 4
- ↳ AME 60652, Homework 5
- ↳ AMe 60652, Midterm Exam
- ↳ AME 60652, Homework 6
- ↳ AME 60652, Homework 7
- ↳ AME 60652, Homework 8
- ↳ AME 60652, Final Exam
- AME 30314, Fall 2009
- ↳ Course Administration
- ↳ AME 30314, Homework 0
- ↳ AME 30314, Homework 1
- ↳ AME 30314, Homework 2
- ↳ AME 30314, Homework 3
- ↳ AME 30314, Homework 4
- ↳ AME 30314, Homework 5
- ↳ AME 30314, Homework 6
- ↳ AME 30314, Homework 7
- ↳ AME 30314, Homework 8
- ↳ AME 30314, Homework 9
- ↳ AME 30314, Homework 10
- AME 30315, Spring 2009
- ↳ Course Administration
- ↳ AME 30315, Homework 1
- ↳ AME 30315, Homework 2
- ↳ AME 30315, Homework 3
- ↳ AME 30315, Homework 4
- ↳ AME 30315, Homework 5
- ↳ AME 30315, Homework 6
- ↳ AME 30315, Homework 7
- ↳ AME 30315, Homework 8
- ↳ AME 30315, Homework 9
- ↳ Pendulum Project
- ↳ AME 30315, Homework 10
- ↳ AME 30315, Homework 11
- ↳ AME 30315, Last Homework
- AME 20214, Fall 2008
- ↳ Course Administration
- ↳ AME 20214, Homework 1
- ↳ AME 20214, Homework 2
- ↳ AME 20214, Homework 3
- ↳ AME 20214, Homework 4
- ↳ AME 20214, Exam I
- ↳ AME 20214, Homework 5
- ↳ AME 20214, Homework 6
- ↳ AME 20214, Homework 7
- ↳ AME 20214, Homework 8
- ↳ AME 20214, Exam II
- ↳ AME 20214, Homework 9
- ↳ AME 20214, Final Exam/Project
- AME 30314, Fall 2008
- ↳ Course Administration
- ↳ AME 30314, Homework 1
- ↳ AME 30314, Homework 2
- ↳ AME 30314, Homework 3
- ↳ AME 30314 Homework 4
- ↳ AME 30314, Homework 5
- ↳ AME 30314, Homework 6
- ↳ AME 30314, Homework 7
- ↳ AME 30314, Homework 8
- ↳ AME 30314, Homework 9
- ↳ AME 30314, Homework X
- ↳ AME 30314, Homework 11
- AME 30315, Spring 2008
- ↳ AME 30315, Homework 11
- ↳ AME 30315, Homework 10
- ↳ AME 30315, Homework 9
- ↳ AME 30315, Homework 8
- ↳ AME 30315, Homework 7
- ↳ AME 30315, Homework 6
- ↳ AME 30315, Homework 5
- ↳ AME 30315, Homework 4
- ↳ AME 30315, Homework 3
- ↳ AME 30315, Homework 2
- ↳ AME 30315, Homework 1
- ↳ AME 30315, Homework 0
- ↳ Course Administration
- AME 30314, Fall 2007
- ↳ AME 30314, Homework 10
- ↳ AME 30314, Homework 9
- ↳ AME 30314, Homework 8
- ↳ AME 30314, Homework 7
- ↳ AME 30314, Homework 6
- ↳ AME 30314, Homework 5
- ↳ AME 30314, Homework 4
- ↳ AME 30314, Homework 3
- ↳ AME 30314, Homework 2
- ↳ AME 30314, Homework 1
- ↳ AME 30314, Homework 0
- ↳ Course Administration
- AME 53591, Fall 2007
- ↳ Seminar Reports
- AME 60652, Fall 2007
- ↳ AME 60652, Homework 8
- ↳ AME 60652, Homework 7
- ↳ AME 60652, Homework 6
- ↳ AME 60652 Midterm Exam
- ↳ AME 60652, Homework 5
- ↳ AME 60652, Homework 4
- ↳ AME 60652, Homework 3
- ↳ AME 60652, Homework 2
- ↳ AME 60652, Homework 1
- ↳ Course Administration
- AME 30314, Fall 2006
- ↳ AME 30314 Homework 11
- ↳ AME 30314 Homework 10
- ↳ AME 30314 Homework 9
- ↳ AME 30314 Homework 8
- ↳ AME 30314 Homework 7
- ↳ AME 30314 Homework 6
- ↳ AME 30314 Homework 5
- ↳ AME 30314 Homework 4
- ↳ AME 30314 Homework 3
- ↳ AME 30314 Homework 2
- ↳ AME 30314 Homework 1
- ↳ AME 30314 Homework 0
- ↳ Course Administration
- AME 30315, Spring 2007
- ↳ AME 30315, Homework 10
- ↳ AME 30315, Homework 9
- ↳ AME 30315, Homework 8
- ↳ AME 30315, Homework 7
- ↳ AME 30315 Homework 6
- ↳ AME 30315 Homework 5
- ↳ AME 30315 Homework 4
- ↳ AME 30315 Homework 3
- ↳ AME 30315 Homework 2
- ↳ AME 30315 Homework 1
- ↳ AME 30315 Homework 0
- ↳ Course Administration
- LINKS
- ↳ Computer Resources
- AME 60611, Fall 2006
- ↳ AME 60611 Final Exam
- ↳ AME 60611 Exam 2
- ↳ AME 60611 Homework 6
- ↳ AME 60611 Homework 5
- ↳ AME 60611 Exam 1
- ↳ AME 60611 Homework 4
- ↳ AME 60611 Homework 3
- ↳ AME 60611 Homework 2
- ↳ AME 60611 Homework 1
- ↳ AME 60611 Homework 0
- ↳ Course Administration
- AME 34314, Fall 2005
- ↳ AME 34314 Homework 10
- ↳ AME 34314 Homework 9
- ↳ AME 34314 Homework 8
- ↳ AME 34314 Homework 7
- ↳ AME 34314 Homework 6
- ↳ AME 34314 Homework 5
- ↳ AME 34314 Homework 4
- ↳ AME 34314 Homework 3
- ↳ AME 34314 Homework 2
- ↳ AME 34314 Homework 1
- ↳ AME 34314 Homework 0
- ↳ AME 34314 Course Administration
- AME 302, Spring 2005
- ↳ AME 302 Homework 11
- ↳ AME 301 Homework 10
- ↳ AME 302 Homework 9
- ↳ AME 302 Homework 8
- ↳ AME 302 Homework 7
- ↳ AME 302 Homework 6
- ↳ AME 302 Homework 5
- ↳ AME 302 Homework 4
- ↳ AME 302 Homework 3
- ↳ AME 302 Homework 2
- ↳ AME 302 Homework 1
- ↳ AME 302 Homework 0
- ↳ AME 302 Course Administration
- AME 698, Spring 2005
- ↳ AME 698 Homework 4/Midterm
- ↳ AME 698 Homework 3
- ↳ AME 698 Homework 2
- ↳ AME 698 Homework 1
- ↳ AME 698 Homework 0
- AME 301, Fall 2004
- ↳ AME 301 Homework 10
- ↳ AME 301 Homework 9
- ↳ AME 301 Homework 8
- ↳ AME 301 Homework 7
- ↳ AME 301 Homework 6
- ↳ AME 301 Homework 5
- ↳ AME 301 Homework 4
- ↳ AME 301 Homework 3
- ↳ AME 301 Homework 2
- ↳ AME 301 Homework 1
- ↳ AME 301 Homework 0
- ↳ AME 301 Course Administration
- AME 550, Fall 2004
- ↳ AME 550 Homework 6/Final Exam
- ↳ AME 550 Homework 5/Exam 2
- ↳ AME 550 Homework 4
- ↳ AME 550 Homework 3/Exam 1
- ↳ AME 550 Homework 2
- ↳ AME 550 Homework 1
- ↳ AME 550 Homework 0
- ↳ AME 550 Course Administration